Наверное, все хотя бы раз видели фотоснимки МКС. Как вы думаете, какая её составляющая важнее всего? Жилые помещения? Лабораторные модули? Противометеоритные панели? Нет. Без любого модуля можно обойтись. А вот без космических манипуляторов — никак. Именно они служал для разгрузки и загрузки кораблей, помощи при стыковке, позволяют проводить все наружные работы. Без них станция мертва.
Эволюция наделила человека удивительными по своему совершенству манипуляторами — руками. С их помощью мы можем творить чудеса. Большой палец, противопоставленный остальным, и гибкие сочленения превращают руки практически в идеальный инструмент. Немудрено, что в качестве прототипа для многих механических конструкций человек использует именно свои руки. И космические манипуляторы не исключение.
Их не так много. Наиболее известная (и ныне применяющаяся на МКС) мобильная система — MSS, чаще называемая Canadarm2, хотя на самом деле Canadarm2 — это лишь один из ее элементов. Система была разработана канадской компанией MDA Space Missions по заказу Канадского космического агентства и стала развитием более простого устройства Canadarm, применявшегося на американских шаттлах. В ближайшее время на станцию должна отправиться система-«конкурент», European Robotic Arm (ERA), разработанная специалистами Европейского центра космических исследований и технологий, базирующегося в голландском Нордвейке. Но обо всем по порядку.
15 июля 2001 года. Манипулятор Canadarm2 выполняет первое официальное задание в составе МКС: подводит совместный шлюзовой отсек «Квест» к американскому модулю «Юнити» (миссия STS-104).
Кленовый лист
Международная космическая станция была введена в эксплуатацию в 1998 году, а 19 апреля 2001-го к ней отправился американский корабль STS-100, несший груз необычайной важности. Основной задачей экипажа была доставка на МКС дистанционного манипулятора SSRMS (Canadarm2) и его монтаж. Систему успешно установили — она стала глобальным вкладом Канадского агентства в строительство международной станции. Система MSS состоит из трех основных компонентов: основного манипулятора (SSRMS, она же Canadarm2); манипулятора специального назначения (SPDM, он же Dextre) и мобильной сервисной базовой системы (MBS).
MBS — это, по сути, базовая платформа, на которой устанавливаются манипуляторы. Она значительно расширяет зону действия Canadarm2. Когда «рука» установлена на MBS, она приобретает подвижное основание, способное двигаться по поверхности станции на рельсах со скоростью до 2,5 см/с. Кроме того, к MBS можно крепить грузы — таким образом, взяв один груз, манипулятор может «припарковать» его на MBS и потянуться за другим.
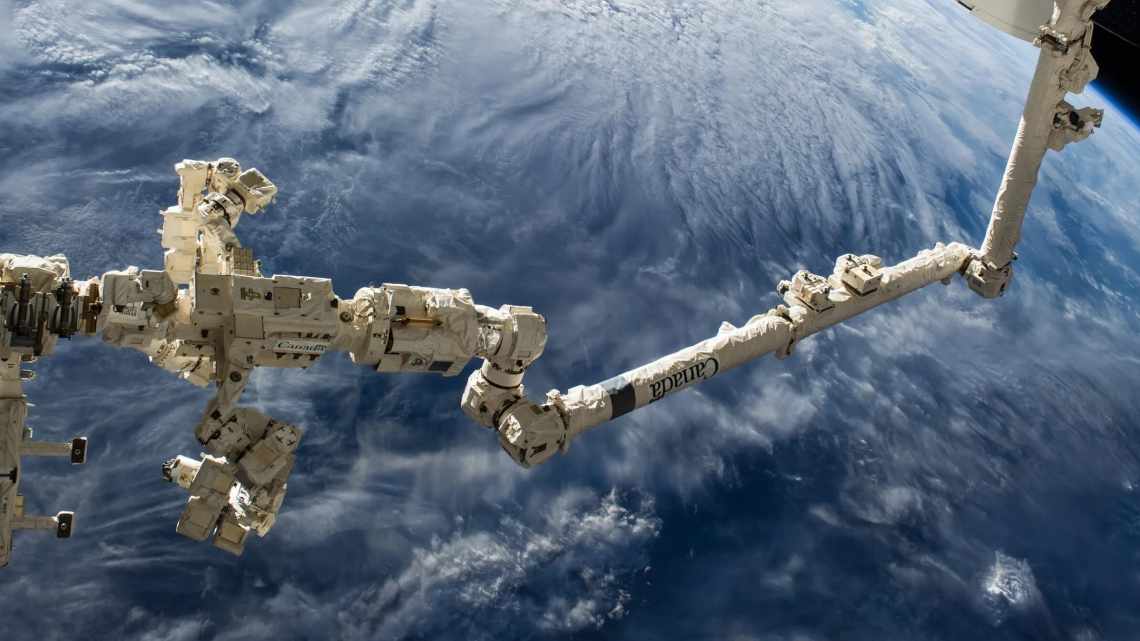
18 мая 2011 года. Во время миссии STS-134 манипулятор «Шаттла» Canadarm передаёт манипулятору МКС Canadarm2 груз – транспортно-складскую палету для установки на орбитальной станции.
Основной манипулятор системы — это, собственно, 17,6-метровая SSRMS, оснащенная семью моторизированными суставами. Ее собственная масса — 1800 кг, а максимальная масса перемещаемого манипулятором груза может достигать 116 т (!). Впрочем, при отсутствии земного притяжения это не такое и большое число; оно ограничено в первую очередь влиянием инерционных сил.
Наиболее интересный элемент системы — это Dextre, двурукий, практически человекообразный телескопический манипулятор. Он появился на МКС значительно позже — в 2008 году с миссией STS-123. Внешне Dextre напоминает 3,5-метрового безголового человека с руками длиной по 3,35 м. Интересно, что нижней частью он может крепиться и к MBS, и к самой Canadarm2, таким образом еще удлиняя ее и позволяя проводить более тонкие операции.
На концах рук Dextre установлены механизмы OTCM (ORU/Tool Changeout Mechanisms) со встроенными «челюстями»-хватателями, телекамерой и прожекторами. Кроме того, в механизмах есть гнездо для сменных инструментов, которые хранятся в «туловище».
2008 год. Наглядное сравнение: нижний манипулятор – SSRMS (Canadarm2), верхний – японский JEMRMS. Выполнение совместной задачи напоминает еду палочками.
В общем и целом сочетание MBS, Canadarm2 и Dextre позволяет «закрывать» нужды большей части станции — перемещать грузы различного размера, пристыковывать модули, переносить космонавтов с точки на точку. Для каждой функции служат различные инструменты-«насадки». Основной пульт управления находится на американском модуле Destiny, активированном в феврале 2001 года, вторичный — на обзорном европейском Cupola (установлен в 2010-м).
MSS вполне справляется с разгрузкой шаттлов, перемещением космонавтов во время выходов в открытый космос, пристыковкой новых модулей. Но одной манипуляторной системы все-таки не хватает — особенно учитывая постепенный рост МКС и появление все новых юнитов и лабораторий. Поэтому для модуля Kibo, запущенного в 2008 году, японцы разработали свой собственный манипулятор, предназначенный для локальных нужд.
2008 год. Робот Dextre (SPDM) установлен на законцовке манипулятора Canadarm2 – это позволяет последнему выполнять более тонкие задачи, а первому – значительно расширить радиус действия.
"